Enhanced Teleoperation - Mini SACR
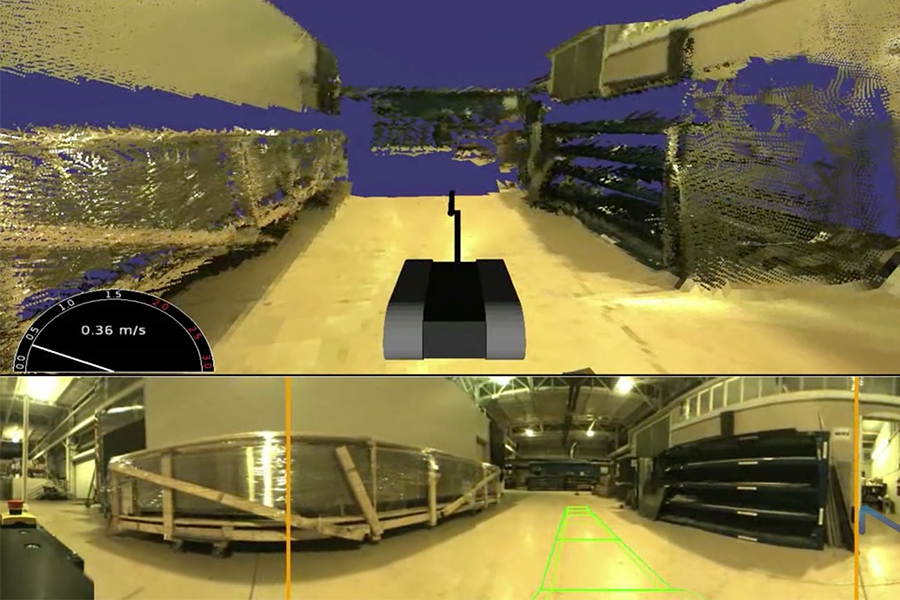
NREC’s miniaturized Situational Awareness Through Colorized Ranging (SACR) system fuses video and range data from a small panoramic camera ring and scanning LADAR sensor. The system provides photo-realistic 3D video and panoramic video images of an EOD robot’s surroundings and autonomously navigates to a location that’s selected by the operator.
Application
The military regularly uses robots to dispose of improvised explosive devices (IEDs). However, operators struggle with remote control when the robot is out of line-of-sight due to the limited 2D video display from the robot’s on-board camera. The camera’s narrow field of view, limited situational awareness, vibration-induced image jittering, all contributes to the difficulty for the operator to maneuver accurately and perform reconnaissance.
To address these problems, NREC created an innovative, miniaturized teleoperation sensor suite that generates real time, photo-realistic 3D video and panoramic video for operators. The virtual camera positioned in the 3D environment intrinsically compensates for vibration and provides a jitter-free video stream, which regular video cameras cannot do. In addition, the system provides semi-autonomous driving assistance.
These capabilities make the robot easier and less fatiguing to operate, improve the operator’s awareness of the robot’s environment, enable reconnaissance while driving, and reduce time spent on task.
Capabilities
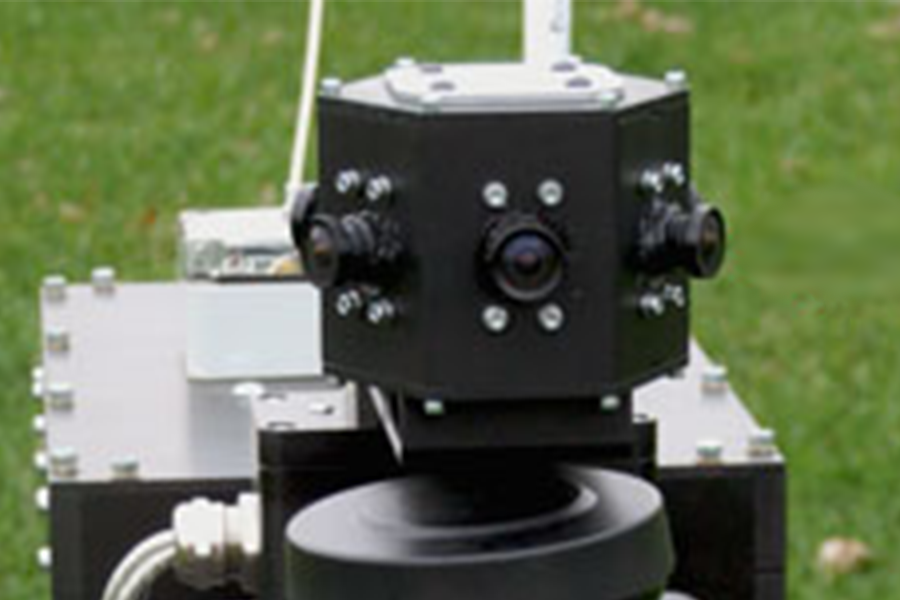
The Mini SACR sensor suite includes a ring of miniaturized video cameras that provide a 360° view of the robot’s environment. It also includes a small but powerful FPGA for processing range and video input. A small scanning LADAR sensor mounted on the robot’s front provides range information.
Mini SACR works under a wide range of lighting. 3D range data from the scanning LADAR is especially useful for navigating in low light conditions. Mini SACR’s “click and go” autonomy assists operators with driving and navigating the robot to a target. Essentially, the robot takes over the most tedious and tiring parts of this task, enabling the operator to perform other tasks at the same time (such as reconnaissance).
Additionally, EOD robots are more affected by vibration than larger UGVs. NREC engineers developed techniques to stabilize the image and minimize the effects of vibration. The result is a steady, accurate 3D image of the robot’s surroundings that does not break up even at higher speeds
Photos